Рециркуляционная вытяжка для кухни
Рециркуляционные вытяжки – самый недорогой вариант вентиляционной техники для кухни. Строго говоря, они и вытяжками то не являются, так как не удаляют воздух из помещения, а только очищают его. Несмотря на это несоответствие, для некоторых кухонь фильтрующие установки остаются единственным вариантом.
Особенности работы
Подключить трубу отвода к вентиляции не всегда представляется возможным. А в многоэтажных домах нередко возникает проблема с вытяжными каналами, которые либо не работают вообще, либо не имеют достаточной тяги. Для такой кухни рециркуляция воздуха – просто находка.
Вентилятор в корпусе вытяжки разрежает атмосферу над работающей плитой, и все потоки нагретого воздуха, щедро наполненного ароматами и сдобренного капельками жира, устремляются к нему. На пути они встречают систему фильтров, которые задерживают на своей поверхности лишние частички. Очищенный воздух тут же возвращается обратно в кухню. Он не уменьшается в объеме и потому не требует организации свежего притока во время работы.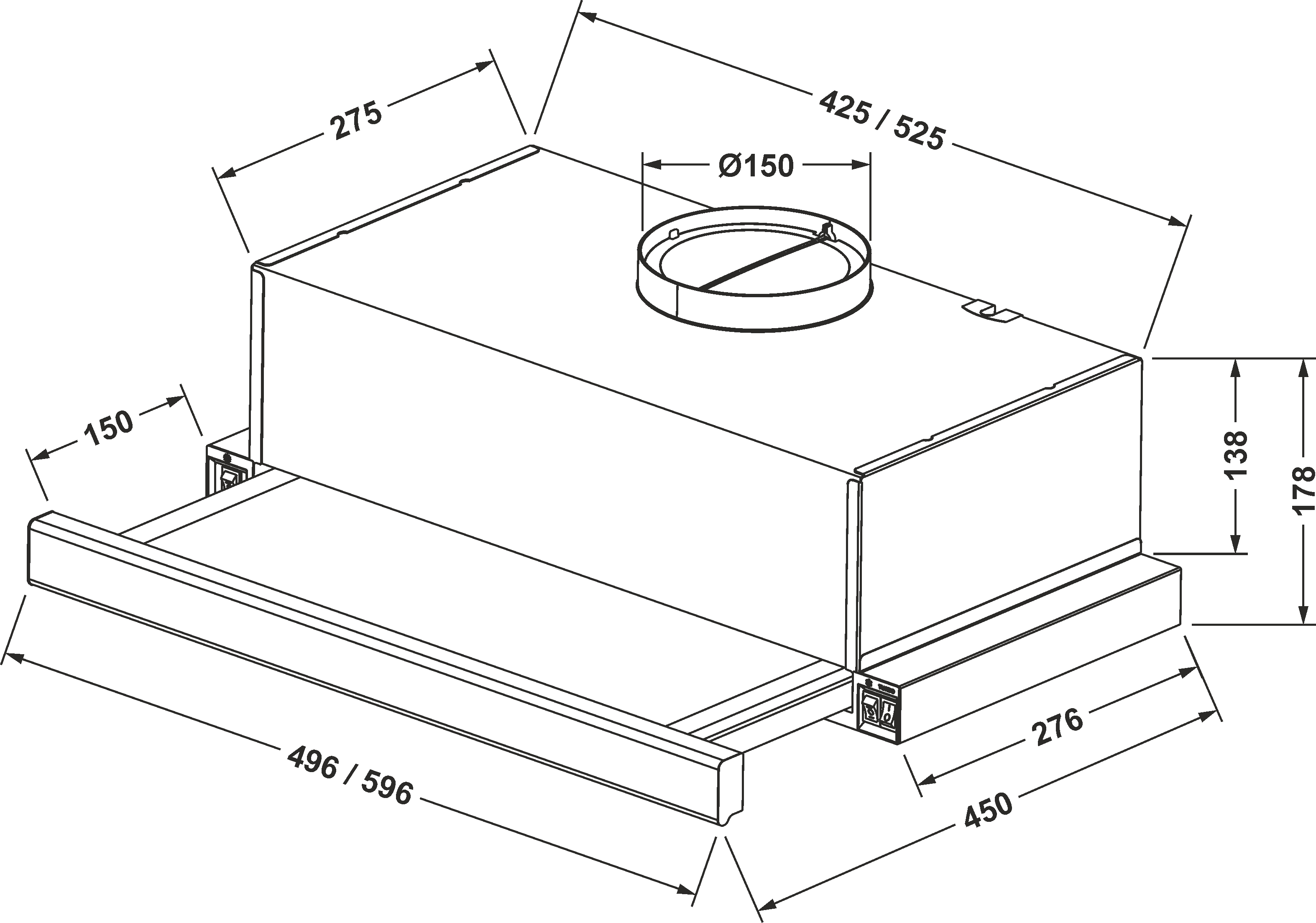 Но это не значит, что обновлять воздух кухни вообще не нужно.
Но это не значит, что обновлять воздух кухни вообще не нужно.
По окончании готовки лучше отключить вытяжку и открыть окно на проветривание для восстановления нормальной атмосферы в помещении.
Ведь современные дома в погоне за энергоэффективностью уже давно закупорены стеклопакетами и герметичными дверями. А без притока свежего воздуха влага из кухни никуда не денется, да и кислорода будет все меньше. Так что стоит озаботиться установкой приточных клапанов на окнах или вентилятора с выходом на улицу.
Конструкции
Решения для фильтрующих установок практически не отличаются от конструкций традиционных вытяжек. Точно так же они могут быть:
- пристенными;
- встраиваемыми;
- островными.
Но автономность таких систем позволила пойти дальше. В отсутствие привязки к воздуховоду конструкторам удалось сделать компактные выдвижные вытяжки для столешниц. В рабочем положении они создают боковую тягу у плиты, не позволяя отработанному воздуху подниматься к потолку. А после готовки утапливаются в специальную нишу стола, становясь с ним единым целым. Компактно и функционально.
А после готовки утапливаются в специальную нишу стола, становясь с ним единым целым. Компактно и функционально.
Плюсы устройства
Фильтрующие вытяжки могут себе позволить мощность, несколько меньшую, чем модели с отводом отработанного воздуха. Естественно, это отражается на стоимости, причем в пользу покупателя. При этом оборудование испытывает минимальные нагрузки, а значит, сможет безаварийно работать намного дольше.
Еще один плюс в пользу автономной вытяжки – она не создает обратной тяги, чем иногда грешат отводные модели. При отсутствии специального клапана вентиляционная техника с выведенным на улицу дымоходом пропускает воздух обратно в кухню. Особенно это чувствуется зимой, когда вытяжка вдруг превращается в кондиционер. С рециркуляционными моделями это исключено.
Автономность вытяжки оставляет свободу для маневра и при установке варочной поверхности. Ее можно поставить там, где будет удобнее работать, а не искать место поближе к вентканалу. Да и внешний облик у фильтрующей вытяжки более аккуратный и компактный. А отсутствие вентиляционной трубы позволяет быстро и без проблем установить технику, не испортив при этом интерьер кухни.
А отсутствие вентиляционной трубы позволяет быстро и без проблем установить технику, не испортив при этом интерьер кухни.
Недостатки
Одним из недостатков рециркуляционной вытяжки называют необходимость частой смены фильтров. С одной стороны, это не вполне справедливо, так как замена производится с той же периодичностью, что и на моделях с отводом – один-два раза в год. С другой – эффективной очистки воздуха можно добиться только при комбинации нескольких типов фильтров, так что замена выйдет дороже.
При покупке обращайте больше внимания на модели популярных серий и стандартных размеров. Для них легче найти съемные кассеты с фильтрами.
Единственный полновесный минус автономных вытяжек – их нельзя устанавливать над газовой плитой. Они не способны справиться с продуктами горения газа, который к тому же выжигает кислород, делая рециркуляцию неэффективной и бессмысленной.
Применяемые фильтры
Обычные металлические сетки на воздухозаборнике вытяжки отфильтровывают из воздуха мельчайшие частички жира, поднимающиеся от плиты. Они всегда идут в комплекте с вентиляционной техникой и являются необходимым минимумом для любой кухни.
Они всегда идут в комплекте с вентиляционной техникой и являются необходимым минимумом для любой кухни.
Соприкасаясь с мелкой сеткой, жир уже не проходит дальше и оседает на фильтре. Через какое-то время панель можно просто снять, вымыть в теплой воде с моющим средством и поставить на место. Чем мельче и сложнее по форме сетка, тем эффективнее будет ее работа. Жироулавливающие фильтры изготавливаются из алюминия или нержавеющей стали, так что они спокойно перенесут даже посудомоечную машину.
Для более тонкой очистки воздуха покупают дополнительные фильтры:
- Акриловые – встречаются нечасто, но тоже допускают многоразовое использование. Их нужно стирать руками, очень осторожно и без отжима, чтобы не нарушить положение волокон.
- С улавливанием жира и избытком влаги хорошо справляются недорогие одноразовые вкладыши: бумажные, синтепоновые, флизелиновые. Их меняют, когда нанесенный рисунок покрывается слоем грязи и становится неразличим.
- Угольные фильтры гораздо плотнее, а благодаря высоким абсорбирующим свойствам наполнителя могут удерживать даже неприятные запахи.
 В большинстве случаев их будет достаточно для эффективной работы вытяжки.
В большинстве случаев их будет достаточно для эффективной работы вытяжки.
 В большинстве случаев их будет достаточно для эффективной работы вытяжки.
В большинстве случаев их будет достаточно для эффективной работы вытяжки.Кассеты с отработанными фильтрами тонкой очистки повторно использовать нельзя, поэтому их выбрасывают, а в вытяжку устанавливают свежие. Насколько часто придется производить замену, зависит от интенсивности эксплуатации техники.
Производители вытяжек для кухни сопровождают свои товары инструкциями, в которых указана периодичность замены кассет. У кого-то это 3 месяца, у кого-то 6. Самые передовые модели оснащаются даже специальными индикаторами, сообщающими хозяевам о состоянии фильтров в системе. Со временем вы выработаете свой оптимальный график их замены. При подборе фильтров для рециркуляционной вытяжки необходимо обратить внимание на количество и размеры слотов под кассеты. Зазоры недопустимы, а негабарит вы просто не сможете правильно установить.
Особенности выбора
Автономные вытяжки могут иметь вполне приличный набор функций. Каждая из них влечет за собой удорожание техники, но и повышает эффективность работы:
- Электронная панель управления с дисплеем для установки и контроля режима работы вытяжки.
- Программируемый таймер включения/выключения.
- Датчики, реагирующие на изменение температуры и влажности, автоматически запускающие работу вентилятора.
- Саморегулировка производительности вытяжки по команде тех же датчиков.
- Пульт дистанционного управления.

Выбирайте ту модель, которая по своему функционалу отвечают вашим потребностям, но не превышают их.
Основным параметром для правильного выбора рециркуляционной вытяжки является ее ширина и глубина. Габариты техники должны соответствовать размерам установленной внизу варочной поверхности, а в идеале быть шире на несколько сантиметров. Так забор отработанного воздуха производится наиболее полно, и эффективность очистки будет максимальной.
Очистка воздуха в ресторане и кафе от дыма и запаха
Очистка воздуха в вытяжке ресторана
Воздух из вытяжки ресторана или кафе, выходящий в жилую зону, может стать причиной жалоб соседей и штрафов проверяющих органов. Если воздуховод нельзя вывести выше конька крыши или на фасад, то единственный способ избежать претензий — добиться эффективной очистки вытяжного воздуха от запахов, дыма, сажи, гари и жира.
Если воздуховод нельзя вывести выше конька крыши или на фасад, то единственный способ избежать претензий — добиться эффективной очистки вытяжного воздуха от запахов, дыма, сажи, гари и жира.
Для этого вентиляция кухни ресторана оснащается системой комплексной очистки воздуха Tion. Она размещается сразу после искрогасителя и жироуловителя и удаляет дым и запахи от горячих цехов, мангалов, грилей и прочих источников. Это позволяет приравнять воздух из вытяжки кухни ресторана к бытовому выбросу и выводить его на уровне первого этажа, не доставляя неудобства людям, проживающим или работающим по соседству (в соответствии с СанПиН 2.3.6.1079-01, п.4.6).
- Для очистки вытяжного воздуха всех видов печей (кроме дровяных и мангалов) используются канальные очистители воздуха Tion Ext (производительность от 400 до 27500 м3/ч).
- Для очистки вытяжного воздуха дровяных печей и мангалов предназначены канальные очистители воздуха Tion Ext Advanced (производительность от 2000 до 6000 м3/ч).
- Для помещений, где концентрации удаляемых загрязнений очень высокие, устанавливается дополнительный блок очистки воздуха ресторана от газов и запахов Tion Ext-El.

Очистка воздуха от дыма и запахов в зале ресторана
Рестораны, кафе, столовые и другие заведения общественного питания часто сталкиваются с проблемой запахов пищи и дыма, которые чувствуются в зале. Чтобы повысить качество обслуживания и лояльность клиентов, необходимо правильно организовать дымоочистку и вентиляцию в столовой зоне ресторана.
Установка для очистки воздуха в ресторане Tion Ext решает задачу удаления дыма и запахов эффективно и выгодно. Благодаря уникальной многоступенчатой системе очистки с дымофильтрами, канальный очиститель воздуха Tion Ext устраняет все типы загрязнений.
Оборудование для очистки воздуха Tion Ext размещается в системе вентиляции ресторана двумя способами.
Компактные очистители воздуха для зала ресторана
Очистку воздуха от запахов и дыма в зале ресторана можно организовать при помощи компактных автономных очистителей воздуха Tion Clever.
Это отличное решение для тех случаев, когда система вентиляции ресторана не предусматривает возможности встроить в нее уловители запаха и дыма.
Автоматизация вытяжки в ванной комнате / Хабр
Ванная комната является помещением, постоянно подвергающимся воздействию повышенной влажности и перепадам температуры — как результат, в нем с легкостью может поселиться плесень и грибок. Основной способ борьбы — вентиляция помещения. Вентиляция может быть как естественной, так и принудительной. Если естественная вентиляция монтируется еще на стадии строительства здания, то принудительная система вентиляции может быть реализована в любой момент времени.
Основной способ борьбы — вентиляция помещения. Вентиляция может быть как естественной, так и принудительной. Если естественная вентиляция монтируется еще на стадии строительства здания, то принудительная система вентиляции может быть реализована в любой момент времени.
Сегодня речь пойдет о том, как путем нехитрых манипуляций сделать автоматизированное включение вентиляции в ванной комнате, чтобы она не превращалась в парную баню и продолжала радовать нас чистотой и свежестью.
По сути, вытяжка в ванной комнате это элементарная вентиляционная система принудительного принципа действия. Она состоит максимум из двух частей – воздуховода, который соединяется с вентиляционным стояком дома, а также непосредственно самого вентилятора.
Обычно принудительное включение вентиляции в ванной реализуют двумя самыми простыми способами:
1. Включается вместе со светом в ванной одним общим выключателем. Но вытяжка обычно нужна только во время принятия душа, когда влажность в ванной повышена.
2. Вручную включать вентилятор вытяжки во время или после принятия душа. Нужен отдельный выключатель. Неудобно. Можно забыть выключить вентилятор, если оставить его включенным для проветривания ванной после принятия душа.
В общем, такой подход к делу не очень правильный, поскольку в этом случае вентиляция помещения производится только тогда, когда в помещении находится человек.
Можно ли автоматизировать управление вентиляцией в ванной комнате и сэкономить электроэнергию? Можно.
Автоматическая вытяжка от обыкновенной отличается только наличием электроники, контролирующей ее работу. Такие устройства либо оснащены таймером выключения (включаются они, как и обыкновенная вытяжка, с помощью клавиши выключателя), либо специальными датчиками, контролирующими влажность в ванной комнате. Как только она превышает допустимое значение, вентилятор включается, после того как влажность приходит в норму, он отключается. Такие вытяжки есть готовые, но можно доработать и уже установленную. В качестве примера мы приводим решение на основе модулей от Мастер Кит.
Такие вытяжки есть готовые, но можно доработать и уже установленную. В качестве примера мы приводим решение на основе модулей от Мастер Кит.
Для решения данной задачи были выбраны следующие модули:
MP590 – цифровой датчик влажности;
MP8037ADC — цифровой модуль защиты и управления с функцией измерения;
BOX-BM8037 – корпус для любительских конструкций с установочными размерами в формате *.PCB
PW1245 – импульсный источник питания 12В 0.5А.
Необходимое оборудование можно увидеть на фото ниже:
Цифровой датчик температуры и влажности DHT11 интерфейс 1WIRE представляет собой модуль, построенный на цифровом датчике влажности DHT11 работающий по интерфейсу 1Wire.
Модуль Цифровой модуль защиты и управления с функцией измерения представляет собой универсальную плату с одним каналом АЦП имеющую три режима работы реле ГИСТЕРЕЗИС, ТРИГГЕР, ЗАЩИТА. Модуль очень универсален и может пригодиться практически для любой автоматизации.
Корпус для любительских конструкций с установочными размерами в формате *. PCB представляет собой универсальный корпус, внутрь которого можно разместить модули MP8037R и MP8037ADC. Так же на сайте скачать файл PCB с установочными размерами LED дисплея и кнопками, для размещения собственных разработок в данном устройстве.
PCB представляет собой универсальный корпус, внутрь которого можно разместить модули MP8037R и MP8037ADC. Так же на сайте скачать файл PCB с установочными размерами LED дисплея и кнопками, для размещения собственных разработок в данном устройстве.
AC/DC Импульсный источник питания 12В 0.5А представляет собой встраиваемый источник питания напряжением 12В, с рабочим током 500 мА. Модуль оснащен всеми видами защит, что говорит о его надежности.
Думаю, эта информация может пригодиться многим, при подборе устройств под свою задачу.
Схема подключения получилась несложной. Ее можно увидеть на эскизе ниже:
Так выглядит модуль в корпусе:
Датчик влажности MP590 размещается с левой стороны, вплотную с корпусом модуля управления. Что бы все выглядело эстетично, выводы модуля можно расположить непосредственно у декоративной крышки вентилятора. Провода питания и управления необходимо припаять непосредственно на клеммы модуля. Благодаря этому, при близком расположении, невидно проводов управления вентилятора и проводов питания MP8037ADC.
Примерный вариант установки модуля с датчиком:
После установки необходимо будет произвести настройку. Для начала, согласно инструкции, переведите управление реле в режим триггер. После чего произведите настройку включения и отключения вентилятора вытяжки. Допустим, модуль показал влажность в районе 40%. Удерживая правую кнопку модуля, более пяти секунд, зайдите в меню включения, и установил значение 100. Подождав три секунды, модуль выйдет из меню. Затем удерживая левую кнопку модуля, более пяти секунд, зайдите в меню отключения и установите значение 50. Подождите, через пять секунды модуль вернется в режим работы.
Как проверить работу всей системы: с помощью горячего душа поднимите влажность в ванной, контролируя показания на дисплее, при 41% должен включиться вентилятор вытяжки. Отключите душ. Через несколько минут, когда влажность понизиться, вентилятор отключится.
Демонстрация работы схемы в режиме контроля влажности:
Теперь ванной комнате нестрашен грибок, плесень и не будет перерасхода электроэнергии.
Возможно, кто-то захочет реализовать данное решение. А может быть, предложит свое?
Автор Рублев Владимир (UA4LOU).
Анатомия автономных транспортных средств: действительно ли ГИС находится под капотом беспилотных автомобилей?
Будет ли ГИС процветать в мире беспилотных автомобилей?
Беспилотные автомобили видят мир, накладывая миллионы сигналов датчиков (около 27 000 световых точек в секунду), которые они собирают в чрезвычайно точную трехмерную карту .
Для каждого движения, которое совершает автомобиль, он вычисляет, основываясь на расположении данных облака точек в географическом пространстве.
Каков потенциал интеграции ГИС-технологий в новые горизонты беспилотных транспортных средств?
И наоборот, как ГИС может извлечь выгоду из мира беспилотных автомобилей?
Восприятие окружающей среды с помощью LiDAR и SLAM
Во-первых, давайте разберемся с мозгом беспилотных автомобилей. Для каждого движения автомобиля он использует LiDAR, радар, камеры и устройства оценки положения, которые постоянно сканируют на 360 °. В сочетании с SLAM (одновременная локализация и картирование) автомобили отображают свое окружение в реальном времени, ориентируясь на основе входного сигнала датчика. Этот взгляд намного превосходит то, что могут видеть люди.
Для каждого движения автомобиля он использует LiDAR, радар, камеры и устройства оценки положения, которые постоянно сканируют на 360 °. В сочетании с SLAM (одновременная локализация и картирование) автомобили отображают свое окружение в реальном времени, ориентируясь на основе входного сигнала датчика. Этот взгляд намного превосходит то, что могут видеть люди.
Несмотря на то, что люди могут легко воспринимать свое окружение, для компьютера это невероятно сложная задача. Например, люди могут распознавать пешеходов, светофоры и пешеходные переходы.Кроме того, люди могут предвидеть движение велосипедистов и полицейских с помощью простых жестов рук.
Вот почему в беспилотных автомобилях используются датчики LiDAR 360 °, установленные на транспортном средстве, что дает полную картину окружающей обстановки. Поскольку данные облака точек постоянно вводятся в алгоритмы машинного обучения (ML), беспилотные автомобили начинают понимать зашумленные данные. Это основной мозг автомобиля, который может извлекать детали из дороги.
В зависимости от того, что было помечено для обучения нейронной сети, это определяет, насколько хорошо она может обнаруживать объекты на дороге.По сути, чем больше вы тренируетесь в различных ситуациях, тем лучше он может отличить пешеходов от дикой природы.
Точная геометрическая карта дорожной сети высокого разрешения
Растущая тенденция заключается в том, что беспилотные автомобили будут использовать GPS только для определения приблизительного местоположения транспортного средства из-за его ненадежности. Например, беспилотный автомобиль Google (Waymo) не может полагаться на GPS из-за принципов его конструкции.
Так могут ли беспилотные автомобили работать исключительно на основе данных датчиков без внешней информации? Другими словами, нужны ли предварительно загруженные 3D-карты для полноценной работы?
Есть много причин полагать, что автономные транспортные средства требуют точных карт из соображений безопасности.Например, при сильном снегопаде или дождевом покрытии дорожной разметки транспортным средствам требуются бордюры и размер полосы движения, чтобы отступить.
Фактически, такие компании, как HERE Maps и TomTom, уже начинают создавать карты высокой четкости (HD), разграничивающие полосы движения для проезжей части. В свою очередь, беспилотные автомобили используют это, чтобы точно знать, где они находятся и движутся.
Динамическая маршрутизация для любой ситуации
Если беспилотный автомобиль хочет добраться из пункта A в пункт B, ему необходимы следующие 3 вещи:
- Существующая дорожная сеть, ограничивающая возможности передвижения.
- Точные геокодированные адреса в нем, чтобы знать, куда они направляются.
- И мощный алгоритм маршрутизации, который доставит вас из пункта А в пункт Б.
Для целей навигации автомобили должны рассчитывать оптимальный по времени или кратчайший путь. Когда ситуация меняется на дороге, им нужно динамически, вычислить второстепенный путь.
Им нужна рабочая среда в виде карт для взаимодействия с входом датчика. В конце концов, это ГИС, работающая в фоновом режиме для определения оптимальных путей.Но иногда оптимальный маршрут не всегда самый короткий. Это тот, у которого меньше всего трафика.
В конце концов, это ГИС, работающая в фоновом режиме для определения оптимальных путей.Но иногда оптимальный маршрут не всегда самый короткий. Это тот, у которого меньше всего трафика.
Объезд пробок и соблюдение правил дорожного движения
Поскольку миллионы пользователей подключаются к Waze, сами того не зная, они приносят важную пользу обществу. То есть они составляют карту дорожных сетей, ограничения поворота и пробки.
В отличие от предыдущих, такие компании, как HERE maps и Waze, понимают загруженность дорог в городах с помощью краудсорсинга. Все на одной карте, наши ежедневные поездки на работу помогут избежать задержек на дорогах, обогатив систему GPS-навигации данными о местоположении.
Со временем ГИС может оптимизировать маршруты, анализируя исторические модели трафика в сочетании с данными трафика в реальном времени . На любой день он может прогнозировать предполагаемое время движения и улучшить общее впечатление от водителя.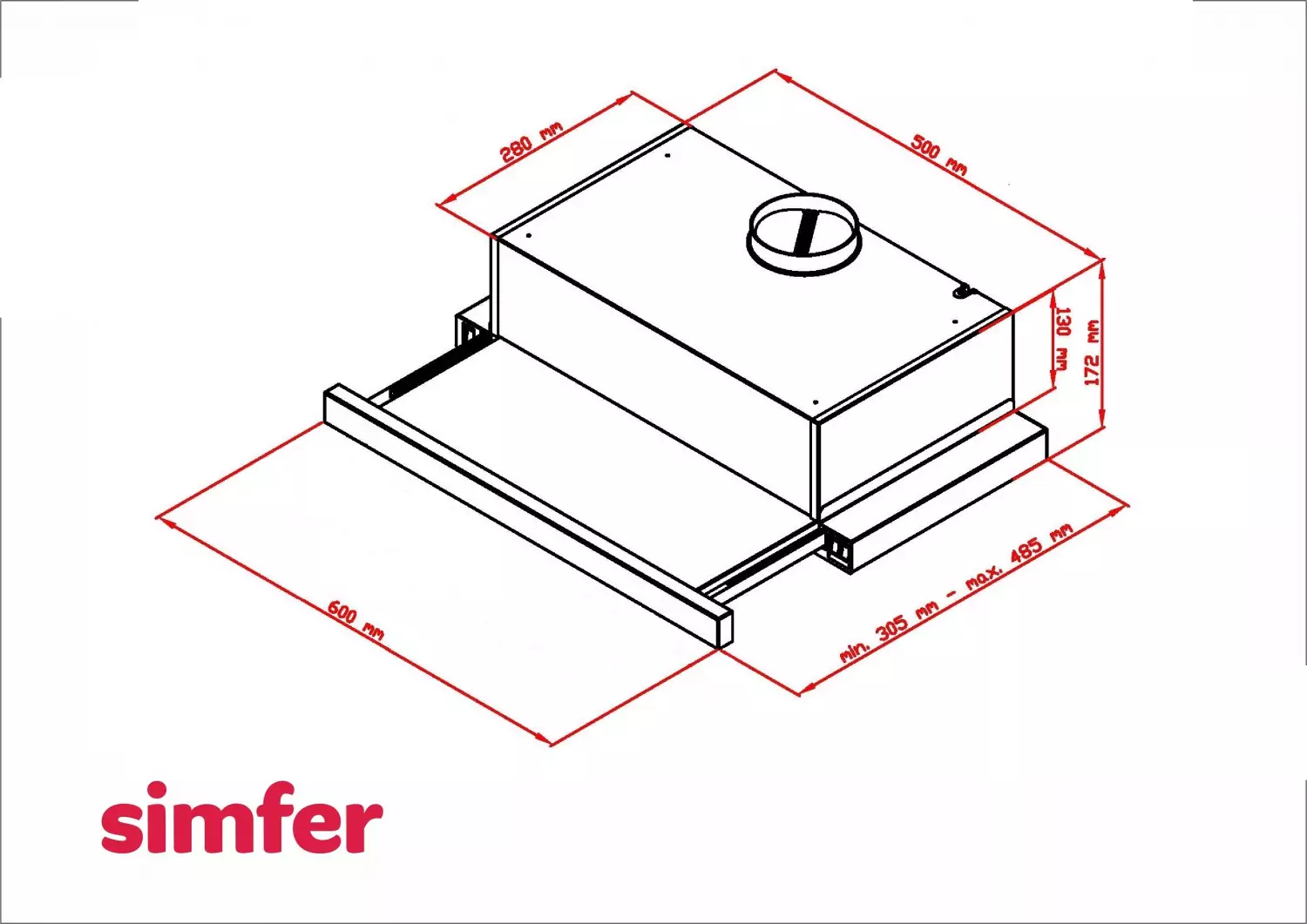
Создание умных городов с помощью Интернета вещей (IoT)
По мере того как беспилотные автомобили начинают патрулировать дорогу, у нас, по сути, есть геодезическое оборудование, которое постоянно строит топографических карт . На них очень подробно запечатлены придорожные объекты, здания и городские пейзажи.И первое, что нужно умным городам, — это инвентаризация всего, что у них есть. Поскольку мы можем получить точную инвентаризацию городских активов, это первый шаг к улучшению координации инфраструктуры.
Чем больше на дорогах транспортных средств, тем более эффективно они подключаются. Теперь мы входим в сферу Интернета вещей (IoT). Имея только восприятие единственного транспортного средства, оно всегда будет реактивным. У нас не может быть никакого предварительного планирования. Но подключенная сеть транспортных средств действует на опережение до того, как обнаружит препятствия в сети.
Например, Интернет вещей поймет, где происходит пробка. Это не только будет ретранслироваться в ваш автомобиль, но и у градостроителей будет информация для улучшения инфраструктуры. Кроме того, он включит геозону в ваш распорядок дня. Будь то безопасность, розничная торговля или доставка, геозона выдает оповещения в режиме реального времени и повышает осведомленность.
Это не только будет ретранслироваться в ваш автомобиль, но и у градостроителей будет информация для улучшения инфраструктуры. Кроме того, он включит геозону в ваш распорядок дня. Будь то безопасность, розничная торговля или доставка, геозона выдает оповещения в режиме реального времени и повышает осведомленность.
Является ли GIS двигателем под капотом для беспилотных автомобилей?
В настоящее время люди полагаются на карты, чтобы добраться до места назначения.То же самое и с автономными транспортными средствами из-за их пространственной природы.
Но они будут сканировать свое окружение и накладывать его на уже существующую карту, чтобы определить, куда идти.
Несмотря на прогресс в технологии SLAM, в настоящее время дилемма заключается в получении точной точности и обновлении карт.
Поскольку беспилотным автомобилям нужны карты, которые не содержат ошибок, постоянно обновляются с абсолютной пространственной точностью, мы не можем отделить их предварительно загруженную карту от внешнего мира, который они снимают.
Cruise излагает свой план «как» сделать роботакси реальностью — TechCrunch
Группа инженеров, выступавших в четверг вечером во время глубокого погружения в технологию автономных транспортных средств Cruise, ни разу не упомянула имя Tesla. В этом не было необходимости, хотя сообщение было достаточно ясным.
Дочерняя компанияGM, занимающаяся автономным управлением, Cruise представила техническую карту и план развертывания — на детальном уровне — которая была направлена на то, чтобы показать, как она создает автономные транспортные средства, которые более безопасны и масштабируемы, чем любой управляемый человеком автомобиль, включая те, которые оснащены передовыми системами помощи водителю. .
В то время как Cruise явно отстаивал свои собственные технологии (не говоря уже о попытках привлечь новые таланты), мероприятие также стало аргументом в пользу автономных транспортных средств в целом. Каждый инженер или руководитель продукта, выступавший в четверг, представил различные компоненты, от того, как он использует моделирование и разработку собственных чипов и другого оборудования до дизайна своего приложения и самого транспортного средства.
Фирменное мероприятие «Под капотом» основано на комментариях, сделанных генеральным директором Дэном Амманном в прошлом месяце во время дня инвестора GM, в котором он изложил план компании по запуску коммерческого роботакси и службы доставки, начиная с модернизированных Chevy Bolts и заканчивая расширением до армию из десятков тысяч специально созданных AV-машин Origin на дороге в течение следующих нескольких лет.
Cruise только что получил в Калифорнии разрешение на оказание коммерческих услуг по доставке, и до взимания платы за вызов без водителя все еще осталось одно разрешение. Тем не менее, Круз считает, что он сможет снизить расходы настолько, чтобы быстро масштабироваться.
Вот как.
Использование моделирования для масштабирования, а не просто проверки системы
Cruise полагается на моделирование не только для подтверждения своей безопасности, но и для масштабирования в новых городах без необходимости сначала проводить в них тесты на миллионы миль.
Компании все равно придется нанести на карту города, в которые она входит. Но не нужно переназначать города, чтобы отслеживать неизбежные изменения в окружающей среде, такие как смена полосы движения или закрытие улиц. Когда Cruise отправляется в новые города, он начинает с технологии, которую он называет WorldGen, которая, по ее словам, обеспечивает точное крупномасштабное создание целых городов, «от их причудливой планировки до мельчайших деталей», что позволяет инженерам тестировать новый операционный дизайн. По словам Сида Ганди, руководителя технической стратегии моделирования в компании Cruise.Другими словами, WorldGen становится площадкой для будущих симуляций.
Чтобы обеспечить оптимальное создание мира, Cruise принимает во внимание такие вещи, как освещение в 24 различных уникальных времени суток и погодные условия, вплоть до систематического измерения света от ряда уличных фонарей в Сан-Франциско.
«Когда мы объединяем высококачественную среду с процедурно созданным городом, мы открываем возможность эффективно масштабировать наш бизнес на новые города», — сказал Ганди.
Затем он изложил технологию «Road to Sim», которая преобразует в редактируемые сценарии моделирования реальные события, которые были собраны AV-системами на дороге. Это гарантирует, что AV не регрессирует, тестируя сценарии, которые он уже видел.
«Дорога к Симу объединяет информацию, полученную от восприятия, с эвристикой, извлеченной из наших миллионов реальных миль, чтобы воссоздать полную среду моделирования на основе дорожных данных», — сказал Ганди. «Когда у нас есть моделирование, мы можем фактически создавать перестановки события и изменять атрибуты, такие как типы транспортных средств и пешеходов.Это очень простой и чрезвычайно эффективный способ создания наборов тестов, ускоряющих разработку AV «.
Для конкретных сценариев, которые Cruise не удалось собрать в реальных дорожных условиях, есть Morpheus. Morpheus — это система, которая может создавать симуляции на основе определенных мест на карте. Он использует машинное обучение, чтобы автоматически вводить столько параметров, сколько нужно, чтобы сгенерировать тысячи интересных и редких сценариев, по которым он тестирует AV.
«По мере того, как мы работаем над решением проблемы с длинным хвостом, мы все меньше и меньше будем полагаться на тестирование в реальном мире, потому что, когда у вас есть событие, которое случается редко, для его правильного тестирования требуются тысячи дорожных миль, и это просто невозможно масштабировать», — сказал Ганди.«Поэтому мы разрабатываем технологию масштабируемого исследования крупномасштабных пространств параметров для создания тестовых сценариев».
Сценарии тестированиятакже включают моделирование реакции других участников дорожного движения на AV. Система Круза для этого называется ИИ неигрового персонажа (NPC), что обычно является термином в видеоиграх, но в этом контексте относится ко всем машинам и пешеходам в сцене, которые представляют сложное поведение нескольких агентов.
«Итак, Морфеус, Road to Sim и ИИ NPC работают вместе в этом действительно продуманном способе, позволяющем нам проводить более надежные испытания при редких и сложных событиях», — сказал Ганди. «И это действительно вселяет в нас уверенность в том, что мы сможем решать редкие проблемы сейчас, а в будущем — аналогичные проблемы».
«И это действительно вселяет в нас уверенность в том, что мы сможем решать редкие проблемы сейчас, а в будущем — аналогичные проблемы».
Генерация синтетических данных помогает Cruise AV нацеливаться на конкретные варианты использования, сказал Ганди, конкретно указав на идентификацию и взаимодействие с транспортными средствами экстренной помощи, по-видимому, по единственной причине, кроме как покопаться в Tesla, чья система автопилота ADAS подверглась федеральному контролю за неоднократное повторение. врезается в машины скорой помощи.
«Машины экстренных служб редки по сравнению с другими типами транспортных средств, но нам необходимо обнаруживать их с чрезвычайно высокой точностью, поэтому мы используем наш конвейер генерации данных для создания миллионов имитационных изображений машин скорой помощи, пожарных машин и полицейских машин», — сказал Ганди.«По нашему опыту, целевые синтетические данные примерно в 180 раз быстрее, чем сбор дорожных данных, и на миллионы долларов дешевле. А с правильным сочетанием синтетических и реальных данных мы можем увеличить количество релевантных данных в наших наборах данных на порядок или больше ».
А с правильным сочетанием синтетических и реальных данных мы можем увеличить количество релевантных данных в наших наборах данных на порядок или больше ».
Два заказных кремниевых чипа собственной разработки
Во время дня инвестора GM в октябре генеральный директор Cruise Дэн Амманн изложил план компании по значительным инвестициям в вычислительную мощность Origin, чтобы снизить затраты на 90% в течение следующих четырех поколений и обеспечить рентабельное масштабирование.В то время Амманн упомянул о намерении Круза самостоятельно производить кремний на заказ, чтобы сократить расходы, но не признал прямо использовать этот кремний для создания микросхемы, но у TechCrunch были свои теории. В четверг Раджат Басу, главный инженер программы Origin, подтвердил эти теории.
«Наша вычислительная платформа четвертого поколения будет основана на нашей собственной разработке микросхем», — сказал Басу. «Это специально создано для нашего приложения. Это позволяет сосредоточиться и улучшает возможности обработки, значительно сокращая при этом штучные затраты и энергопотребление. Вычислительные ресурсы являются критически важной системой с точки зрения безопасности, и в них встроена избыточность. Добавьте к этому AV-систему, которая обрабатывает до 10 гигабит данных каждую секунду, и мы в конечном итоге потребляем изрядное количество энергии. Наш чип MLH позволяет нам управлять сложными конвейерами машинного обучения гораздо более целенаправленно, что, в свою очередь, помогает нам быть более энергоэффективными без ущерба для производительности ».
Вычислительные ресурсы являются критически важной системой с точки зрения безопасности, и в них встроена избыточность. Добавьте к этому AV-систему, которая обрабатывает до 10 гигабит данных каждую секунду, и мы в конечном итоге потребляем изрядное количество энергии. Наш чип MLH позволяет нам управлять сложными конвейерами машинного обучения гораздо более целенаправленно, что, в свою очередь, помогает нам быть более энергоэффективными без ущерба для производительности ».
Cruise по искусственному интеллекту разработала два чипа: чип обработки сенсора будет обрабатывать края для ряда сенсоров, таких как камеры, радар и акустика.Второй чип, предназначенный для использования в качестве выделенного процессора нейронной сети, поддерживает и ускоряет приложения машинного обучения, такие как большие многозадачные модели, разработанные командой AI. Басу говорит, что чип ускорителя машинного обучения (MLA) — это как раз тот размер, который подходит именно для определенного класса нейронных сетей и приложений машинного обучения, и не более того.
«Это позволяет поддерживать производительность на чрезвычайно высоком уровне и гарантирует, что мы не тратим энергию на то, что не приносит нам добавленной стоимости», — сказал Басу.«Он может работать в паре с несколькими внешними хостами или работать автономно. Он поддерживает одиночные сети Ethernet до 25 Гбит / с с общей пропускной способностью 400 Гбит / с. Микросхема MLA, которую мы запускаем в серийное производство, — это только начало. Со временем мы продолжим повышать производительность при одновременном снижении энергопотребления ».
Экосистема круиза
Одна вещь, которую Круз ясно дал понять во время своего мероприятия, заключается в том, что он подумал не только об AV-технологии, необходимой для успешного масштабирования, но и о всей экосистеме, которая включает в себя такие вещи, как операторы удаленной помощи для проверки решения AV, когда оно встречается с неизвестным. сценарии, обслуживание клиентов, автомобиль, на котором люди действительно хотят ездить, и приложение, которое может эффективно и легко справляться с такими вещами, как поддержка клиентов и реагирование на инциденты.
«Чтобы действительно преодолеть пропасть от исследований и разработок к любимому продукту, требуется нечто большее, чем просто искусственный интеллект и робототехника», — сказал на мероприятии Оливер Кэмерон, вице-президент Cruise по продуктам. «Одного безопасного беспилотного транспортного средства недостаточно, и это всего лишь первый шаг в долгом-долгом путешествии. Чтобы по-настоящему создать и масштабировать конкурентоспособный продукт, который миллионы людей внедряют в свою повседневную жизнь, вам необходимо создать множество дифференцированных функций и инструментов на основе безопасного беспилотного вождения.Как эти функции должны быть реализованы, неочевидно, особенно если ваша компания все еще решает проблемы безопасности ».
Как будут работать беспилотные автомобили
Отлично, ботаники. Мы получим это. Мы думали, что у нас будут летающие машины, но у нас нет. Вы знаете, что у нас есть? Куча автомобилей разъезжает по большому метро Сан-Франциско с причудливыми штуковинами на крыше! Это одинаково круто, правда?
Может быть, это больше похоже на Бэтмена, сделанное своими руками, чем на Супермена, обладающего способностями при рождении.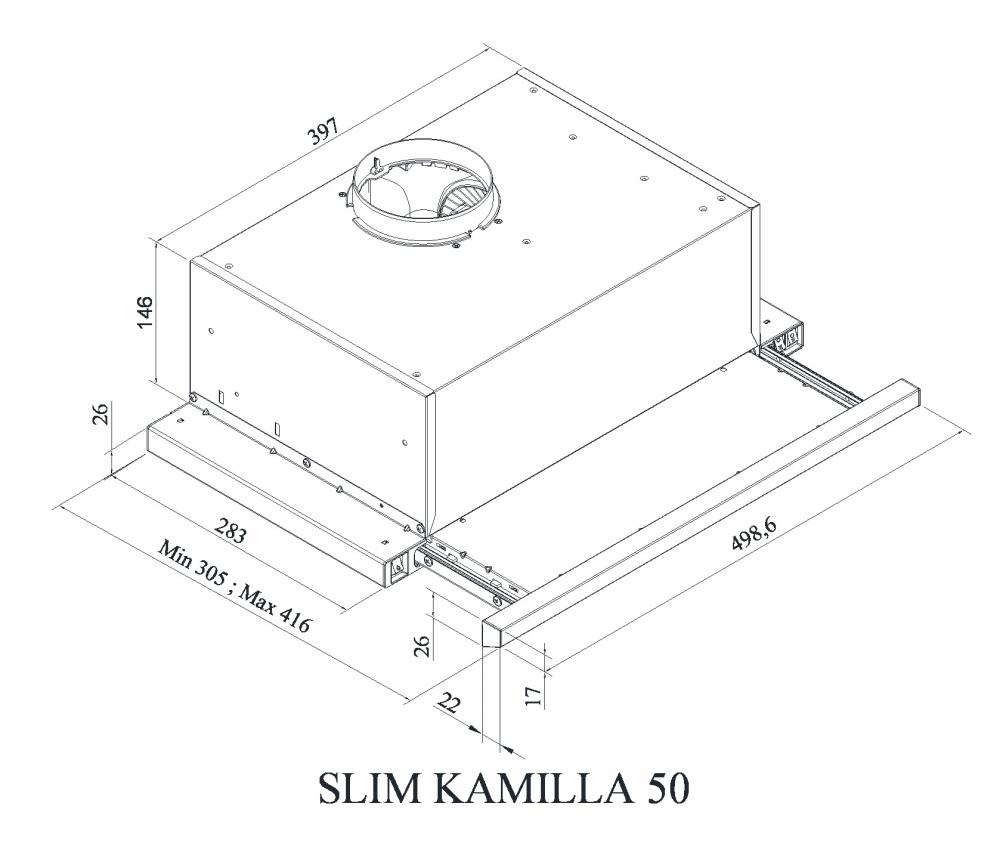 Но это работает. У Google есть парк беспилотных автомобилей с 2009 года, и они проехали более полумиллиона миль (804 672 км) без аварий. Водители-люди попадают в аварии в среднем каждые полмиллиона миль (804 672 км) в Соединенных Штатах, так что либо машины Google должны появиться, либо они снова обгонят людей.
Но это работает. У Google есть парк беспилотных автомобилей с 2009 года, и они проехали более полумиллиона миль (804 672 км) без аварий. Водители-люди попадают в аварии в среднем каждые полмиллиона миль (804 672 км) в Соединенных Штатах, так что либо машины Google должны появиться, либо они снова обгонят людей.
Несколько производителей работают над беспилотными автомобилями, но, поскольку Google во всех странах активно участвует в этом проекте, они также более откровенно (в некотором роде) рассказывают, как работают их автомобили.Система Chauffeur, как они ее называют, использует лидар, который обозначает обнаружение света и определение расстояния и не имеет отношения к лигру, который является львом и тигром. Лидар работает как радар и сонар, но гораздо точнее. Он отображает точки в космосе с помощью 64 вращающихся лазерных лучей, выполняя более миллиона измерений в секунду, чтобы сформировать трехмерную модель в своем компьютерном мозге с точностью до сантиметра. Предварительно загруженные карты сообщают системе, где находится стационарное оборудование — светофоры, пешеходные переходы, телефонные столбы — а лидар заполняет ландшафт движущимися объектами, такими как люди. У него также есть старый радар, камера и GPS.
У него также есть старый радар, камера и GPS.
Но не закрывайте глаза маской для сна и не откидывайте водительское сиденье полностью назад. Чафферу по-прежнему иногда нужно, чтобы вы взяли его на себя, например, выезжая из гаража или на подъездную дорожку или заходя в него, или преодолевая сложные развязки на автомагистралях. Даже автомобиль-робот не может понять съезды с левой полосы движения.
Система Google не обязательно связана с Prius, хотя до сих пор это были автомобили, которые наиболее часто использовались во время тестирования.Этот большой кронштейн можно было прикрепить к любой машине с датчиками и программным обеспечением для работы с ним — и с деньгами. Цена Чаффера должна будет снизиться с $ 75 000, чтобы ее приняли большинство водителей. Google ожидает, что он будет готов и — скрестив пальцы — достаточно дешевым, чтобы люди могли себе его позволить к 2018 году.
Активное обучение и автономные транспортные средства
В публикации на прошлой неделе мы рассмотрели, сколько данных необходимо для обучения автономного транспортного средства. И это только начало. Автономные автомобили не только должны использовать весь человеческий опыт вождения — они должны быть готовы к условиям реального мира, которые постоянно развиваются.Чтобы беспилотный автомобиль смог освоить дорогу, ему необходимо огромное количество информации, поступающей из самых разных источников.
И это только начало. Автономные автомобили не только должны использовать весь человеческий опыт вождения — они должны быть готовы к условиям реального мира, которые постоянно развиваются.Чтобы беспилотный автомобиль смог освоить дорогу, ему необходимо огромное количество информации, поступающей из самых разных источников.
Ключ к успеху заключается не только в обучении модели в первую очередь, но и в ее обновлении, чтобы избежать повторения ошибок или неспособности определить необычные условия. Активное обучение дает возможность оптимизировать использование людей в цикле путем выявления крайних случаев для проверки человеком.
Что такое активное обучение?
В машинном обучении активное обучение — это итеративное обучение с учителем, которое позволяет алгоритму запрашивать источник информации, чтобы пометить новые точки данных желаемыми выходными данными.Его можно использовать для преодоления узких мест в маркировке данных за счет значительного сокращения количества требуемых вручную маркированных образцов.
Модели машинного обучения требуют огромных объемов обучающих данных для хорошей работы. Но в то время как данные легко доступны, огромный размер наборов данных делает ручную маркировку непрактичной. В то же время модель обучения с учителем не может работать без участия людей. А выбор случайного набора данных для маркировки вручную не обеспечивает достаточного разнообразия данных.
Активное обучение отдает приоритет данным для ручной маркировки, что значительно снижает нагрузку на людей. Это процесс постоянного совершенствования, который постепенно увеличивает точность модели, постоянно обновляя ее с помощью актуальной обучающей информации. Он создает повторяемый цикл обучения:
- Обучение — Модель обучается с использованием доступных помеченных наборов данных. Во-первых, модель не будет очень точной из-за ограничений ручной маркировки общих наборов данных.
- Запрос — Модель выбирает немаркированные данные, используя стратегию наименьшей достоверности, маржинальную выборку или энтропию, а затем направляет их для маркировки вручную.
- Маркировка — Эксперты-люди маркируют выбранные данные и добавляют их в модель обучения. В каждом случае точность модели постепенно повышается.

Источник: масштабируемое активное обучение для автономного вождения: практическая реализация и A / B-тест, NVIDIA AI
Основная цель активного обучения — определить, какие данные нужно пометить вручную.Обычно это достигается с помощью выборки неопределенности, когда устанавливается пороговое значение для машины, чтобы решить, запрашивать ли данные или нет. Для автономных транспортных средств этот порог должен быть установлен чрезвычайно низким, учитывая, что даже малейшая ошибка может означать разницу между жизнью и смертью в реальном сценарии.
Вот три основных подхода к выборке неопределенности:
- Наименьшая достоверность — Используя этот подход, модель активного обучения выбирает данные, которые не соответствуют порогу достоверности.Например, если модель не на 99,9% уверена, что представляет собой конкретный объект, она инициирует запрос для дальнейшего анализа.
- Выборка маржи — Этот подход помогает исправить недостатки в стратегии наименьшего доверия путем включения второй наиболее вероятной метки для данных. Это дает модели возможность различать две наиболее вероятные метки.
- Энтропия — Этот подход измеряет неопределенность случайной величины. Это позволяет системе использовать все возможные вероятности метки.Запрашивается экземпляр с наивысшим значением энтропии.

Что это означает для автономных транспортных средств?
Одно из самых больших препятствий при обучении автономных транспортных средств — это выявление крайних случаев. В то время как обучить автономную систему ИИ распознавать общие объекты и сценарии относительно просто, научить ее распознавать необычные условия и объекты на дороге — совсем другое дело.
Другой проблемой является получение достаточного количества размеченных данных для учета этих крайних случаев.Люди могут легко и надежно воспринимать дорожные условия практически в любом месте или в любой среде. Автономное транспортное средство должно воспринимать те же условия так же хорошо или, что желательно, даже лучше, чем человек.
Автономное транспортное средство должно воспринимать те же условия так же хорошо или, что желательно, даже лучше, чем человек.
Неожиданные дорожные заграждения, экзотические животные и необычные дорожные знаки — вот лишь несколько распространенных примеров. Кроме того, существуют менее распространенные ситуации, такие как грузовик, буксирующий прицеп, буксирующий квадроцикл, который система самоуправления может различить как два или даже три отдельных автомобиля.
Активное обучение работает, обнаруживая вещи, которые машина не распознает с достаточной уверенностью, а затем направляет их людям для маркировки. Например, исследование NVIDIA AI обнаружило трехкратное повышение точности при использовании активного обучения для обучения моделей обнаружению пешеходов в ночное время.
Поможет ли активное обучение новаторам достичь пятого уровня автономии?
Учитывая огромное разнообразие дорожных условий во всем мире, активное обучение предлагает практический способ оптимизации усилий по маркировке данных, необходимых для достижения четвертого и пятого уровней автономии. Это масштабируемое решение, сочетающее в себе человеческий опыт и машинное обучение, что имеет решающее значение для обеспечения отсутствия слепых зон, когда полностью автономные автомобили наконец-то выйдут на мировой рынок.
Это масштабируемое решение, сочетающее в себе человеческий опыт и машинное обучение, что имеет решающее значение для обеспечения отсутствия слепых зон, когда полностью автономные автомобили наконец-то выйдут на мировой рынок.
Ясно одно: аннотации, созданные человеком, всегда будут важной частью разработки автономных транспортных средств и обслуживания моделей. Управляемые группы аналитиков CloudFactory предоставляют масштабируемые услуги маркировки данных для новаторов в области автономных транспортных средств. Вам нужна помощь с аннотациями? Давай поговорим.
Электронная книга: Under the Digital Hood
Откройте для себя последние разработки в области адаптивных вычислений и искусственного интеллекта для автономных транспортных средств
Добавить закладкуЗагрузите вашу копию
Мы уважаем вашу конфиденциальность. Нажимая «Загрузить копию», вы соглашаетесь на передачу ваших данных спонсору, который может продвигать аналогичные продукты и услуги, относящиеся к вашей сфере интересов, в соответствии с их политикой конфиденциальности.Вы имеете право возражать. Кроме того, вы будете получать нашу электронную новостную рассылку с информацией о соответствующих возможностях онлайн-обучения. Для получения дополнительной информации о том, как мы обрабатываем и отслеживаем ваши личные данные, а также информацию о вашей конфиденциальности и правах на отказ, щелкните здесь.
Нажимая «Загрузить копию», вы соглашаетесь на передачу ваших данных спонсору, который может продвигать аналогичные продукты и услуги, относящиеся к вашей сфере интересов, в соответствии с их политикой конфиденциальности.Вы имеете право возражать. Кроме того, вы будете получать нашу электронную новостную рассылку с информацией о соответствующих возможностях онлайн-обучения. Для получения дополнительной информации о том, как мы обрабатываем и отслеживаем ваши личные данные, а также информацию о вашей конфиденциальности и правах на отказ, щелкните здесь.
AV продолжает развиваться быстрыми темпами, и, несмотря на периодические препятствия, автомобильные лидеры и крупные технологические компании добиваются значительных успехов в своих усилиях по достижению более высокого уровня автономии.
Появляются новые системные архитектуры и программные инструменты, поддерживающие интенсивную вычислительную среду AV. Между тем ускорение работы всего приложения для расширенной обработки и логического вывода ИИ, охватывающего транспортное средство, периферию и облако, набирает обороты.
Между тем ускорение работы всего приложения для расширенной обработки и логического вывода ИИ, охватывающего транспортное средство, периферию и облако, набирает обороты.
В связи с тем, что границы, разделяющие разработку аппаратного и программного обеспечения, становятся все тоньше, эта электронная книга от Avnet Silica рассматривает ключевые достижения, ускоряющие ускорение технологий помощи водителю в AV-дороге. В нем есть отдельные главы, посвященные передаче от транспортного средства к облаку, алгоритмам AV, роли центров обработки данных в ускорении кривой AV, а также новейшим разработкам в области адаптивных вычислений и программного обеспечения.
Загрузите эту электронную книгу, чтобы узнать:
- Как продвигается развитие более высоких уровней автономии в AV-технологиях.
- Новые системные архитектуры и программные инструменты для поддержки AV-среды с интенсивными вычислениями.
- Ключевые достижения, ускоряющие продвижение современных технологий помощи водителю в AV-дороге.

Мы уважаем вашу конфиденциальность. Нажимая «Загрузить копию», вы соглашаетесь на передачу ваших данных спонсору, который может продвигать аналогичные продукты и услуги, относящиеся к вашей сфере интересов, в соответствии с их политикой конфиденциальности.У вас есть право возражать. Кроме того, вы будете получать нашу электронную новостную рассылку с информацией о соответствующих возможностях онлайн-обучения. Для получения дополнительной информации о том, как мы обрабатываем и отслеживаем ваши личные данные, а также информацию о вашей конфиденциальности и правах на отказ, щелкните здесь.
Спонсор:
Автономный обучаемый гуманоид, использующий симулированный почерк
Робот для того, чтобы облегчить необходимость разговорного агента, мы находим основание полагать, что создание такого
социального взаимодействия — нетривиальная задача. Анекдоты из предварительных исследований
Анекдоты из предварительных исследований
показали, что некоторые дети могут критиковать чужие демонстрации роботу, что может или
не может быть таким вредным для самоэффективности ребенка, как когда
их критикуют в типичной форме. образовательный контекст.
Каким образом восприятие детьми робота как обучающегося агента
может измениться в долгосрочной перспективе, еще предстоит увидеть.
В одном случае во время предварительных исследований,
ответ ребенка на вопрос, может ли НАО написать свое собственное имя
(ранее не продемонстрировано), включал, что у него могут быть
проблемы с буквой «n», поскольку в этом письме ребенок исправлял робота
.Мы полагаем, что пользователь проецировал
человеческих обучающих функций, таких как забывчивость, на
робота, хотя технически они не присутствовали в системе
. Это может потребоваться при рассмотрении того, как расширить взаимодействие для долгосрочного использования, поскольку
нынешняя система — с такой скоростью обучения, что прогресс
очевиден для пользователя — вызовет конвергенцию для письмо
за несколько итераций.
Мы ожидаем, что включение базы данных букв
, нарисованных детьми, в процесс моделирования формы будет способствовать созданию
моделей форм, которые фиксируют более широкий диапазон из
ошибок, типичных для детей, изучающих почерк. Однако
текущая система имеет концептуальный характер — подход только для PCA
не может сгенерировать или изучить другую топологию формы — и
технический — в настоящее время не реализована поддержка форм
, которые требуют подъема пера между штрихами — ограничения, которые
необходимо будет преодолеть.
Если система расширена, чтобы допустить более широкий диапазон ошибок
, то дальнейшая тема для исследования — это то, как генерируемые вручную ошибки записи
системы могут быть абстрагированы
на более высокий уровень контроля так что учитель может настроить его для работы с ребенком над определенным типом ошибок
на основе успеваемости ребенка. Где будет баланс
между развитием автономных способностей для системы
определять трудности ребенка и предоставлением возможности преподавательскому составу
решать за себя вместо этого?
Решение этих проблем продвинет нас дальше к
и ответит, будет ли добавление обучаемого робота-агента к
вмешательствам с почерком на пользу самооценке, мотивации и обучению участников
.
7. ВОЗДЕЙСТВИЕ И ЗАКЛЮЧЕНИЕ
Мы полагаем, что эта статья представляет три заслуживающих внимания
вклада: инновационное приложение обработки данных
и искусственный интеллект для обучения рукописным письмам —
листов, подходящих для образовательных целей; роботизированная система, которая
смогла обеспечить основу для сложных взаимодействий человек-робот
(социальное взаимодействие учителя и ученика, обучение с помощью демонстрации
, моделирование тонкой моторики роботов) в течение
двух предварительных исследований; и начальное экспериментальное исследование
новой роли роботов в образовании
.
В частности, технические проблемы, связанные с разработкой обучаемого робота-агента в контексте рукописного ввода
, которые были рассмотрены в этой работе, включают:
• развитие возможностей робота с ограниченными двигательными возможностями
, в частности, робот NAO, чтобы ввести в действие почерк
датчик таким образом, чтобы он мог взаимодействовать с детьми. Это достигается
за счет использования симулированного рукописного ввода с синхронизированным планшетом
, обменивающимся данными через ROS;
• разработка алгоритма, способного включать отзывы пользователей и демонстрации
для адаптации искусственно созданного качества рукописного ввода
для имитации обучаемого агента
, который был реализован посредством main-
, использующего алгоритм обучения в пространстве параметров
модели формы на основе PCA и сходящиеся к
параметры пользовательских демонстраций; и
• интеграция системы в рабочий костюм взаимодействия —
способна вовлекать детей в обучение путем обучения парадигме
, достигается путем объединения возможностей роботизированного рисования
и алгоритма обучения для рукописного ввода —
десять букв установлены с центральный контроллер
, который управляет потоком взаимодействия, очередью и интеграцией подключенных устройств
.
Тем не менее, мы считаем, что наибольшее влияние эта работа
имеет для сообщества взаимодействия человека и робота и относится к
самой природе взаимодействия, которому способствовало это исследование.
В работе, представленной здесь, исследуется особая роль робота
в обучении почерку: робот
не только активно выполняет действия, рисуя буквы, но и
делает это таким образом, чтобы вовлекать ребенка в процесс. очень специфическая социальная роль
.Ребенок является учителем в этих отношениях, а
робот является учеником: ребенок должен вступить в (мета) когнитивные отношения
с роботом, чтобы попытаться понять
, почему робот терпит неудачу и как ему лучше всего помочь . Здесь робот
— это больше, чем просто фасилитатор или оркестратор —
его физическое присутствие и воплощение побуждают действовать и
антропоморфизируют, а также когнитивно вовлекают ребенка в учебную деятельность
, которая, как мы прогнозируем, приведет к более высокому уровню
.эффективность обучения.
Также примечательно, что робот не используется в обычном контексте
робототехники или компьютерного образования, а вместо этого используется в деятельности —
рукописного ввода — которая требует высоких физических навыков. В таких действиях воплощенная природа робота подходит как
в вмешательствах, где вызывается имитация мотора [2], движение руки
, например, само по себе является частью обучения. Более того, сталкиваясь с ребенком со школьными трудностями, роботы
могут играть роль наивного ученика, которого ни взрослые, ни
сверстников — из-за социальных эффектов, которые это вызовет — могут убедительно
. играть.В этом направлении мы надеемся увидеть больше
исследований в области образовательных приложений робототехники, не относящихся к STEM.
Сильное социальное воздействие проблем раннего образования
делает продолжение исследований в этой области, несомненно, серьезной проблемой для робототехники и взаимодействия человека с роботом.
Благодарности
Это исследование было поддержано Швейцарским национальным научным фондом
через Национальный центр компетенции в исследовательской робототехнике
.
8. ССЫЛКИ
[1] W. A. Bainbridge, J. W. Hart, E. S. Kim и
B. Scassellati. Преимущества взаимодействия с
роботов физического присутствия по сравнению с агентами, отображаемыми на видео.
International Journal of Social Robotics, 3 (1): 41–52,
2011.
[2] VW Berninger, KB Vaughan, RD Abbott, SP
Abbott, LW Rogan, A. Brooks, E. Reed , и
Автономный обучаемый гуманоид, использующий имитацию почерка
Аннотация
© 2015 ACM.В этой статье представлен новый робот-партнер, которого дети могут научить писать от руки. Система полагается на парадигму обучения путем обучения для построения взаимодействия, чтобы стимулировать мета-познание, сочувствие и повышенную самооценку у ребенка-пользователя. Мы предполагаем, что использование гуманоидного робота в такой системе может не только привлечь немотивированного ученика, но также предоставить детям возможность ощутить преимущества физического воздействия, возникающие при вмешательстве рукописного ввода под руководством человека, например, моторной мимикрии.Используя симулированный почерк на синхронизированном дисплее планшета, робот-гуманоид NAO с ограниченными возможностями мелкой моторики был сконфигурирован в качестве подходящего партнера для написания почерка. Статистические модели формы, полученные на основе анализа основных компонентов набора данных траекторий написанных взрослыми писем, позволяют роботу рисовать намеренно деформированные буквы. Благодаря обратной связи с демонстрациями, полученными пользователями, система может определить оптимальные параметры для соответствующих моделей формы.Предварительные исследования на местах были проведены с классами начальной школы, чтобы получить представление о том, как дети используют новую систему. Дети в возрасте 6-8 лет успешно работали с роботом и улучшили его письмо до уровня, которым они остались довольны. Подтверждение взаимодействия представляет собой значительный шаг на пути к инновационному использованию робототехники, которое решает широко распространенную и социально значимую проблему в образовании.
Цитирование
Худ, Д., Lemaignan, S., & Dillenbourg, P. (2015). Когда дети учат робота писать: автономный обучаемый гуманоид, использующий имитацию почерка. В материалах конференции ACM / IEEE по взаимодействию человека и робота 2015 г., (83-90). https://doi.org/10.1145/2696454.2696479
.